9장 비지도학습¶
감사의 글¶
자료를 공개한 저자 오렐리앙 제롱에게 깊은 감사를 드립니다. 이와 더불어 한빛미디어로부터 강의준비에 필요한 자료를 지원받았음을 밝히며, 이에 대해 진심어린 감사를 전합니다.
- 레이블이 없는 데이터 학습
- 예제: 사진에 포함된 사람들 분류하기
- 용도
- 군집(clustering)
- 이상치 탐지
- 밀도 추정
- 군집(clustering): 비슷한 샘플끼리 군집 형성하기
- 데이터 분석
- 고객분류
- 추천 시스템
- 검색 엔진
- 이미지 분할
- 준지도 학습
- 차원 축소
- 이상치 탐지: 정상테이터 학습 후 이상치 탐지.
- 제조라인에서 결함제품 탐지
- 시계열데이터에서 새로운 트렌드 찾기
- 밀도 추정: 데이터셋 생성확률과정의 확률밀도함수 추정 가능
- 이상치 분류: 밀도가 낮은 지역에 위치한 샘플
- 데이터분석
- 시각화
주요 내용¶
- 군집
- K-평균
- DBSCAN
- 가우시안혼합
군집/군집화¶
- 군집(클러스터, cluster): 유사한 샘플들의 모음(집합, 그룹)
- 군집화(clustering): 유사한 부류의 대상들로 이루어진 군집 만들기
분류 대 군집화¶
- 유사점: 각 샘플에 하나의 그룹 할당
- 차이점: 군집화는 군집이 미리 레이블(타깃)로 지정되지 않고 예측기 스스로 적절한 군집을 찾아내야 함.
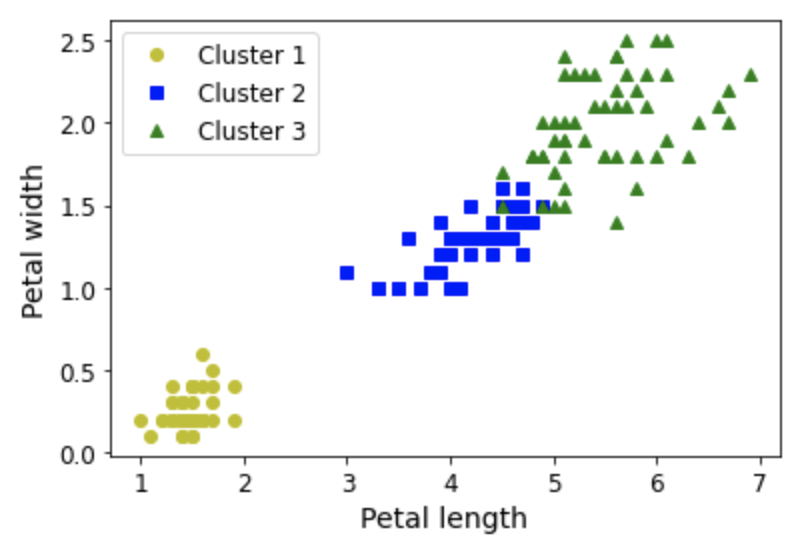
예제¶
- 왼편: 분류
- 오른편: 군집화
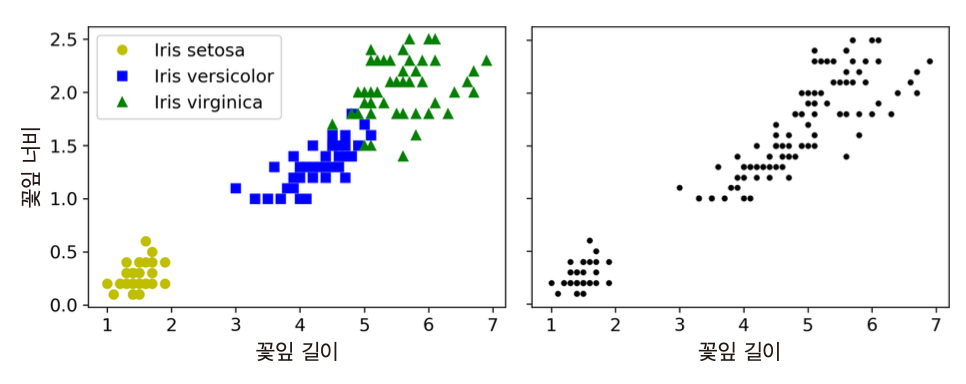
- 가우시안혼합 모델 적용하면 매우 정확한 군집화 가능
- 4개의 특성 모두 사용할 경우
- 꽃잎의 너비/길이, 꽃받침의 너비/길이
군집화 활용 예제¶
- 고객 분류
- 데이터 분석
- 차원축소 기법
- 이상치탐지
- 준지도학습
- 검색엔진
- 이미지 분할
군집의 정의¶
- 보편적 정의 없음. 사용되는 알고리즘에 따라 다른 형식으로 군집 형성
- K-평균: 센트로이드(중심)라는 특정 샘플을 중심으로 모인 샘플들의 그룹
- DBSCAN: 밀집된 샘플들의 연속으로 이루어진 그룹
- 가우시안혼합 모델: 특정 가우시안 분포를 따르는 샘플들의 그룹
- 경우에 따라 계층적 군집의 군집 형성 가능
비지도 학습 모델 1: K-평균¶
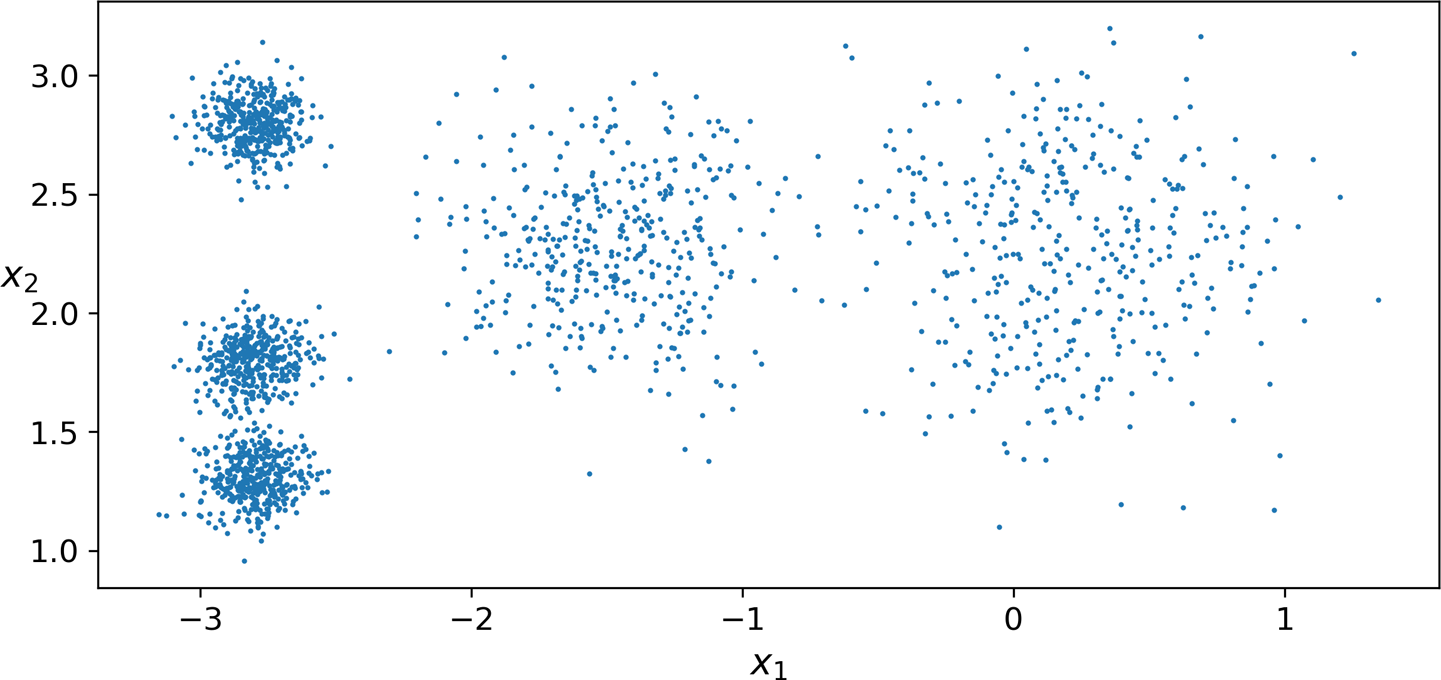
예제¶
- 샘플 덩어리 다섯 개로 이루어진 데이터셋
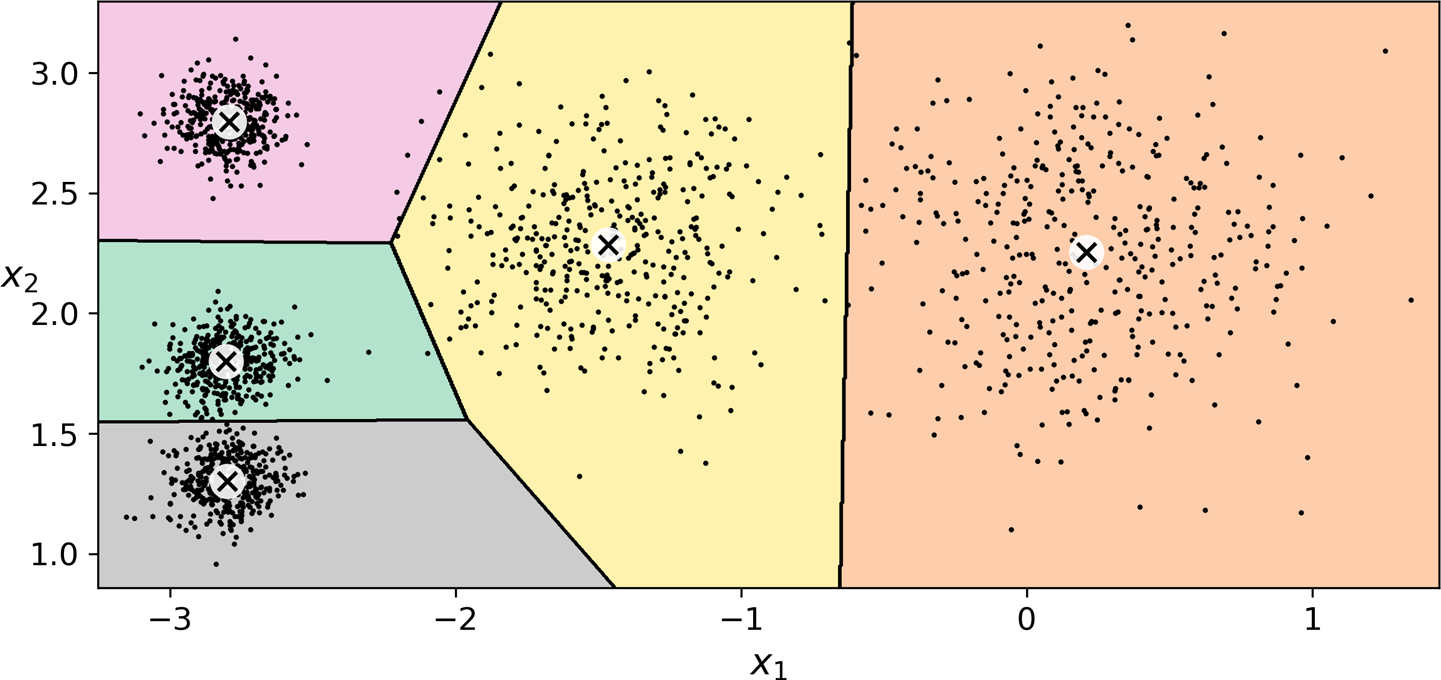
(사이킷런) K-평균 알고리즘 적용¶
- 각 군집의 중심을 찾고 가장 가까운 군집에 샘플 할당
- 군집수(
n_clusters) 지정해야 함.
from sklearn.cluster import KMeans
k = 5
kmeans = KMeans(n_clusters=k, random_state=42)
y_pred = kmeans.fit_predict(X)
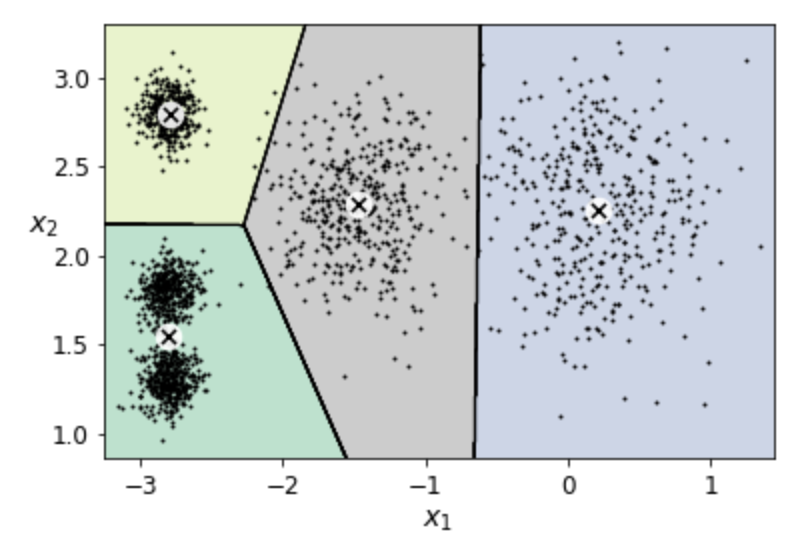
결정 경계¶
- 결과: 보로노이 다이어그램
- 평면을 특정 점까지의 거리가 가장 가까운 점의 집합으로 분할한 그림
- 경계 부분의 일부 샘플을 제외하고 기본적으로 군집이 잘 구성됨.
K-평균 알고리즘의 단점 1¶
- 군집의 크기가 서로 많이 다르면 잘 작동하지 않음.
- 샘플과 센트로이드까지의 거리만 고려되기 때문.
하드 군집화 대 소프트 군집화¶
- 하드 군집화: 각 샘플에 대해 가장 가까운 군집 선택
- 소프트 군집화: 샘플별로 각 군집 센트로이드와의 거리 측정
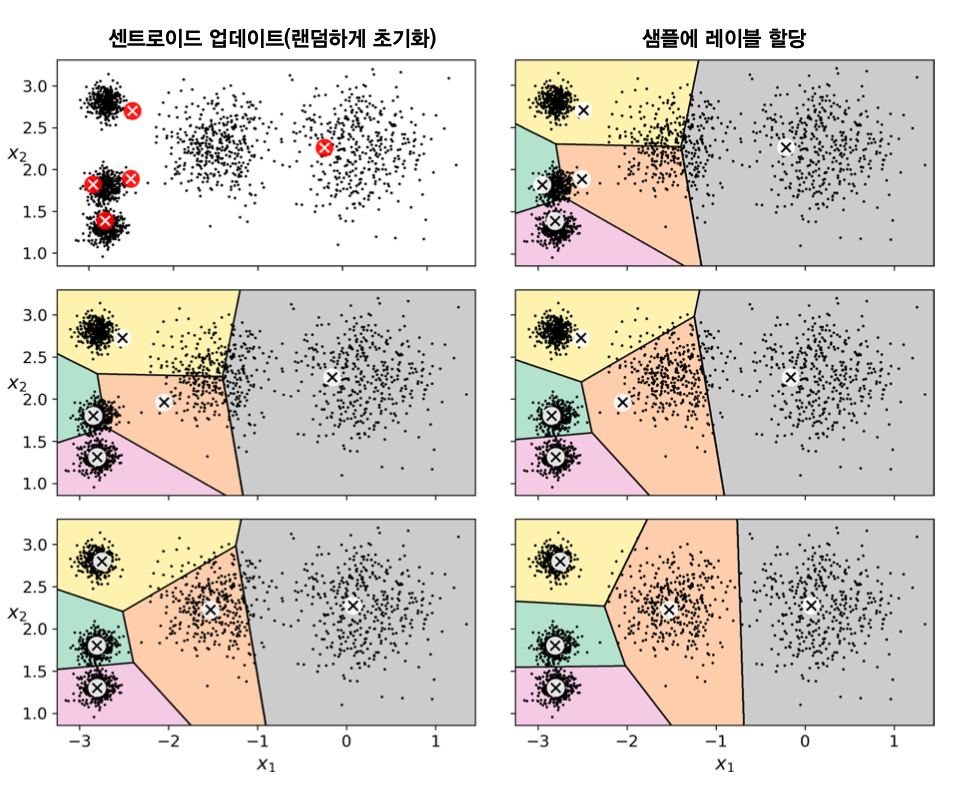
K-평균 알고리즘¶
- 먼저 $k$ 개의 센트로이드 랜덤 선택
- 수렴할 때까지 다음 과정 반복
- 각 샘플을 가장 가까운 센트로이드에 할당
- 군집별로 샘플의 평균을 계산하여 새로운 센트로이드 지정
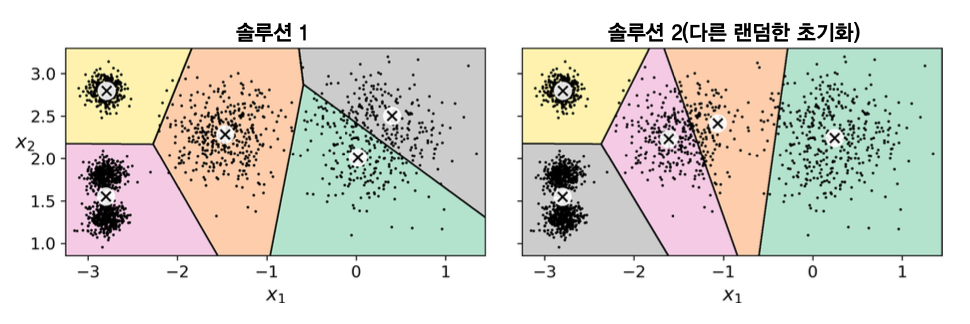
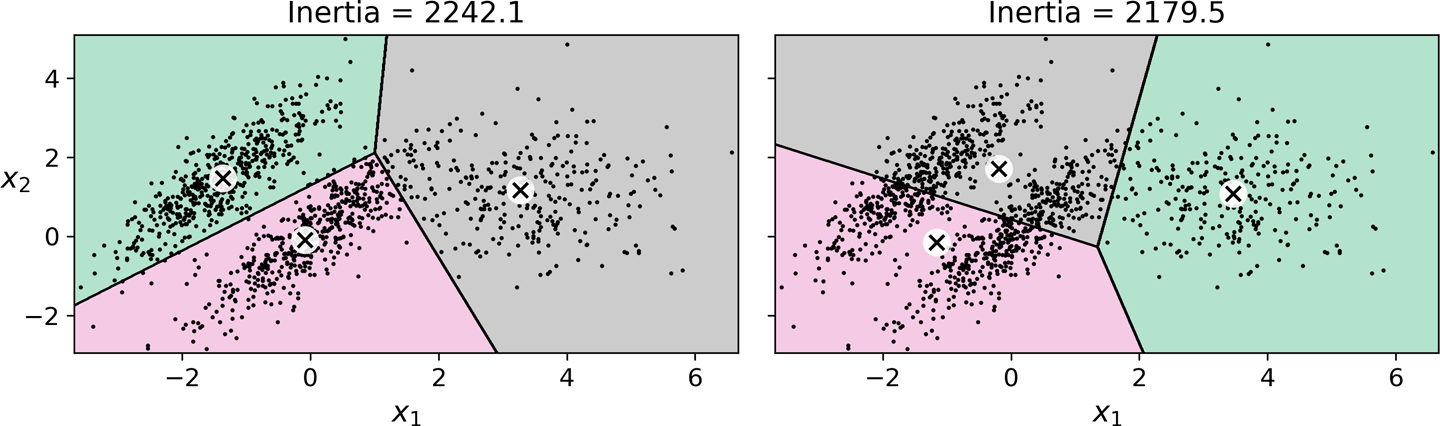
K-평균 알고리즘의 단점 2¶
- 초기 센트로로이드에 따라 매우 다른 군집화 발생 가능
관성(inertia, 이너셔)¶
- k-mean 모델 평가 방법
- 정의: 샘플과 가장 가까운 센트로이드와의 거리의 제곱의 합
- 각 군집이 센트로이드에 얼마나 가까이 모여있는가를 측정
score()메서드가 측정. (음수 기준)
좋은 모델 선택법¶
- 다양한 초기화 과정을 실험한 후에 가장 좋은 것 선택
n_init = 10이 기본값으로 사용됨. 즉, 10번 학습 후 가장 낮은 관성을 갖는 모델 선택.
K-평균++¶
- 센트로이드를 무작위로 초기화하는 대신 특정 확률분포를 이용하여 선택
- 센트로이드들 사이의 거리를 크게할 가능성이 높아짐.
KMeans모델의 기본값으로 사용됨.
elkan 알고리즘¶
algorithm=elkan: 학습 속도 향상됨.
- 단, 밀집데이터(dense data)만 지원하며, 희소데이터는 지원하지 않음.
- 밀집데이터셋에 대한 기본값임.
algorithm=full: 희소데이터에 대한 기본값.
미니배치 K-평균¶
- 미니배치를 지원하는 K-평균 알고리즘:
MiniBatchMeans
- 사용법은 동일
from sklearn.cluster import MiniBatchKMeans
minibatch_kmeans = MiniBatchKMeans(n_clusters=5, random_state=42)
minibatch_kmeans.fit(X)
memmap 활용¶
- 대용량 훈련 세트 활용하고자 할 경우
- 8장 PCA에서 사용했던 기법과 동일
memmap 활용이 불가능할 정도로 큰 데이터셋을 다뤄야 하는 경우¶
- 미니배치로 쪼개어 학습
MiniBatchKMeans의partial_fit()메서드 활용
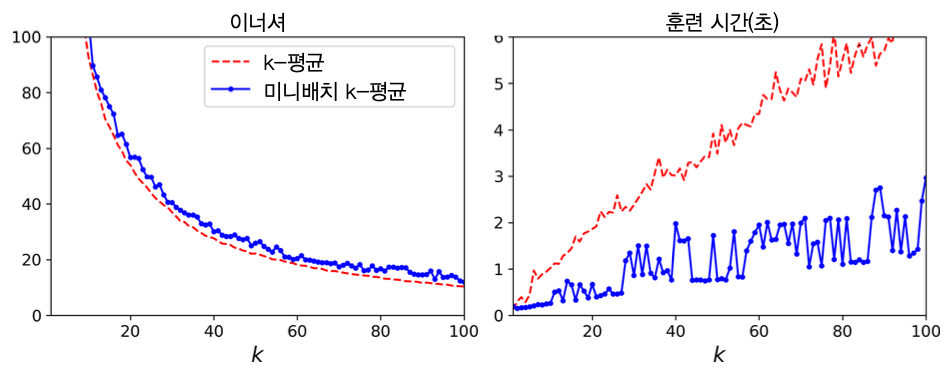
미니배치 K-평균의 특징¶
- K-평균보다 훨씬 빠름.
- 하지만 성능은 상대적으로 좀 떨어짐.
- 군집수가 증가해도 마찬가지임.
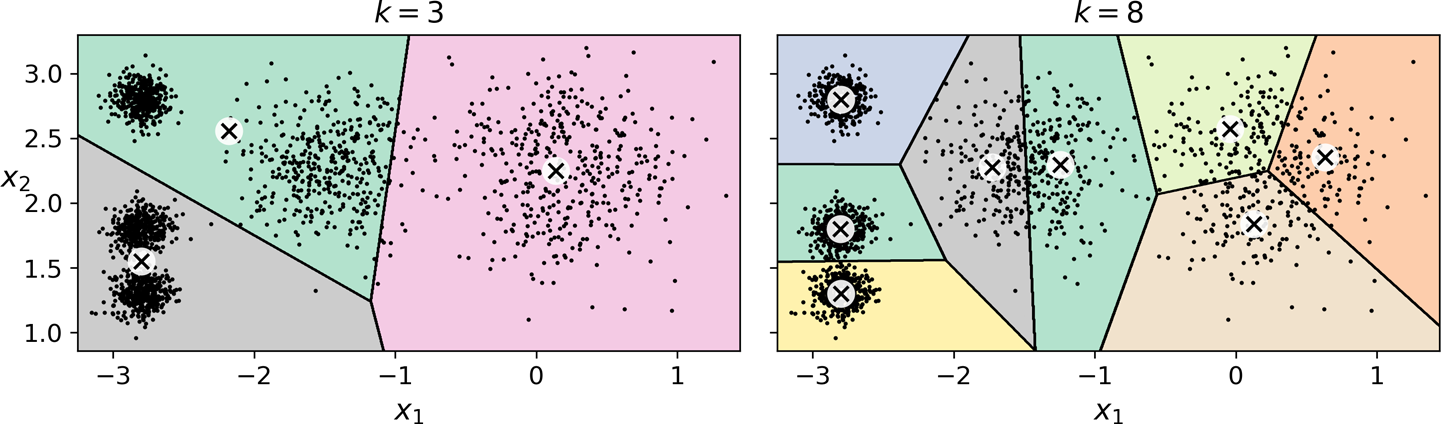
최적의 군집수 찾기¶
- 최적의 군집수를 사용하지 않으면 적절하지 못한 모델을 학습할 수 있음.
관성과 군집수¶
- 군집수 k가 증가할 수록 관성(inertia) 줄어듬.
- 따라서 관성만으로 모델을 평가할 없음.
- 관성이 더 이상 획기적으로 줄어들지 않는 지점의 군집수 선택 가능
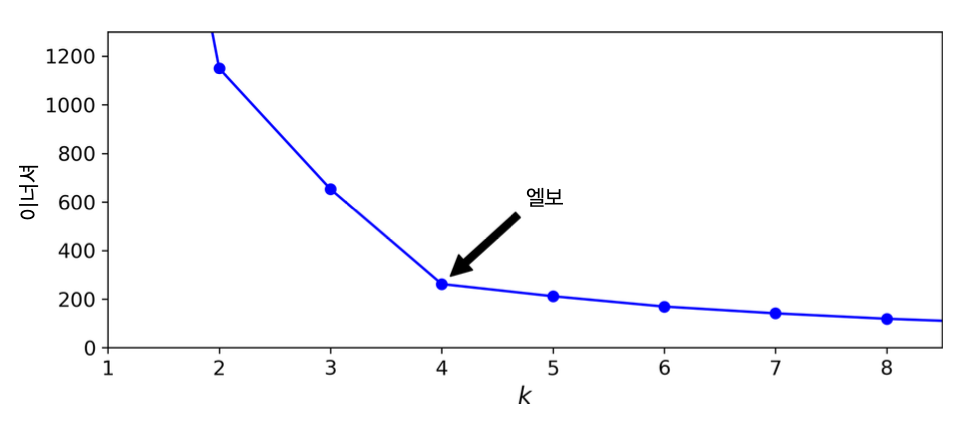
- 위 그래프에 의해
k=4선택 가능. - 하지만 아래 그림에서 보듯이 좋은 성능이라 말하기 어려움.
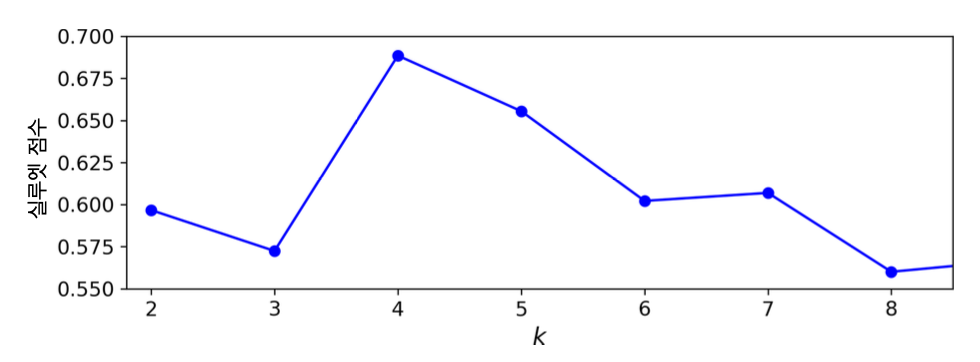
실루엣 점수와 군집수¶
- 샘플별 실루엣 계수의 평균값
- 실루엣 계수: -1과 1사이의 값
- 1에 가까운 값: 적절한 군집에 포함됨.
- 0에 가까운 값: 군집 경계에 위치
- -1에 가까운 값: 잘못된 군집에 포함됨
- 아래 그림에 의하면
k=5도 좋은 선택이 될 수 있음.
실루엣 다이어그램과 군집수¶
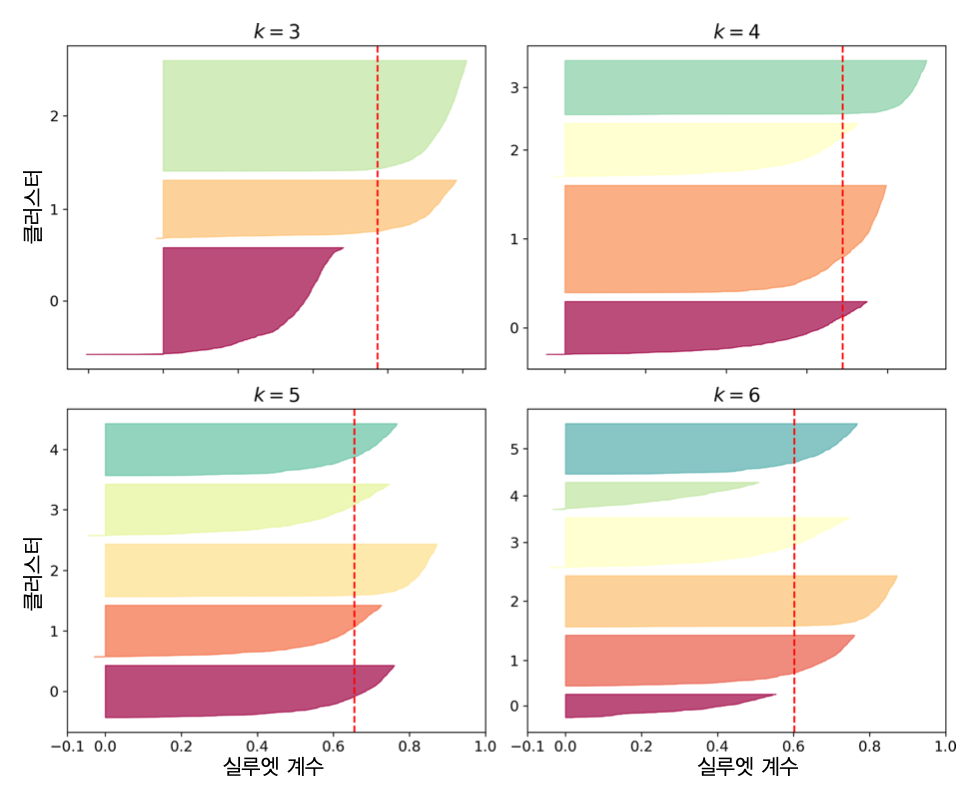
- 실루엣 다이어그램
- 군집별 실루엣 계수 모음. 칼 모양.
- 칼 두께: 군집에 포함된 샘플 수
- 칼 길이: 군집에 포함된 각 샘플의 실루엣 계수
- 빨간 파선: 군집별 실루엣 점수
- 대부분의 칼이 빨간 파선보다 길어야 함.
- 칼의 두께가 서로 비슷해야, 즉, 군집별 크기가 비슷해야 좋은 모델임.
- 따라서
k=5가 보다 좋은 모델임.
K-평균의 한계¶
- 최적의 모델을 구하기 위해 여러 번 학습해야 함.
- 군집수를 미리 지정해야 함.
- 군집의 크기나 밀집도가 다르거나, 원형이 아닐 경우 잘 작동하지 않음.
군집화 활용: 이미지 분할¶
이미지 분할¶
- 이미지를 여러 영역(segment)으로 분할하기
- 동일한 종류의 물체는 동일한 영역에 할당됨.
- 자율주행: 보행자들을 모두 하나의 영역, 또는 각각의 영역으로 할당 가능
- 합성곱 신경망이 가장 좋은 성능 발휘
- 여기서는 K-평균을 이용하여 색상분할 실행
- 인공위성 사진 분석: 전체 산림 면적 측정
- 군집수가 중요함.
segmented_imgs = []
n_colors = (10, 8, 6, 4, 2)
for n_clusters in n_colors:
kmeans = KMeans(n_clusters=n_clusters, random_state=42).fit(X)
segmented_img = kmeans.cluster_centers_[kmeans.labels_]
segmented_imgs.append(segmented_img.reshape(image.shape))

군집화 활용: 전처리¶
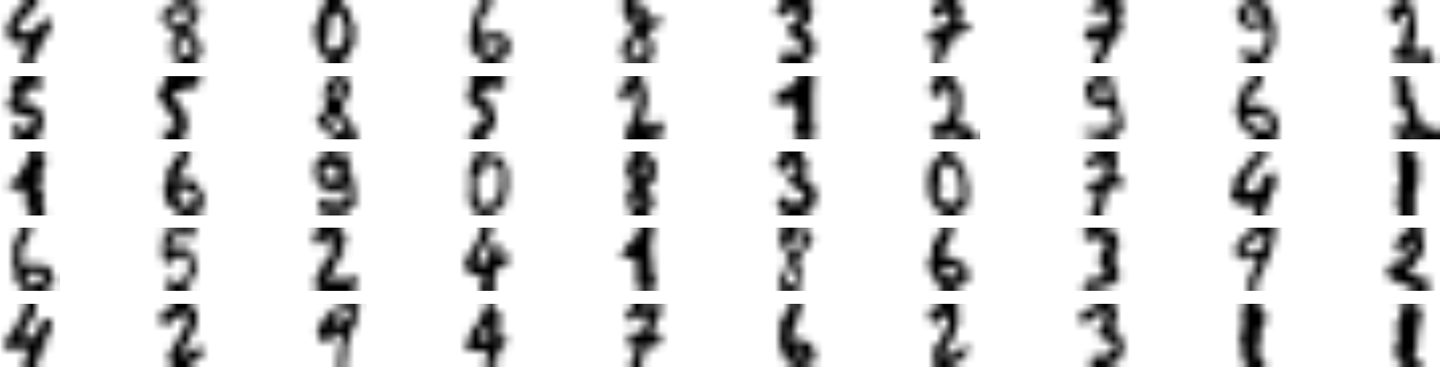
미니 MNIST 데이터셋 전처리¶
- MNIST와 비슷한 숫자 데이터셋
- 8x8 크기의 흑백 사진 1,797개.
- 전처리 없이 로지스틱회귀 학습시키면 96.89% 정확도 보임.
K-평균 활용 전처리 후 로지스틱회귀 학습¶
- 구역수: 50
pipeline = Pipeline([
("kmeans", KMeans(n_clusters=50, random_state=42)),
("log_reg", LogisticRegression(multi_class="ovr", solver="lbfgs", max_iter=5000, random_state=42)),
])
pipeline.fit(X_train, y_train)
- 정확도: 97.78%로 증가
- 전처리 단계로 K-평균을 활용하기에 그리드 탐색 등을 이용하여 최적의 군집수 확인 가능.
- 최적 군집수: 99
- 모델 정확도: 98.22%
param_grid = dict(kmeans__n_clusters=range(2, 100))
grid_clf = GridSearchCV(pipeline, param_grid, cv=3, verbose=2)
grid_clf.fit(X_train, y_train)
군집화 활용: 준지도 학습¶
- 레이블이 있는 데이터가 적고, 레이블이 없는 데이터가 많을 때 활용
예제: 미니 MNist (계속)¶
- 50개 샘플을 대상으로 학습한 모델의 성능: 83.33% 정도
- 하지만 50개의 군집으로 나눈 후 군집별로 대표 이미지 50개 선정.
- 군집 센트로이드에 가장 가까운 샘플
- 50개 사진을 보고 수동으로 레이블 작성
- 위 50개 샘플을 이용하여 학습된 모델 성능: 92.22%로 향상
레이블 전파¶
- 위 50개의 그림과 동일한 군집에 속한 샘플에 동일한 레이블 전파하기.
- 군집에 속한 전체 샘플 보다 센트로이드에 가까운 20% 정도에게만 레이블 전파 후 학습
- 센트로이드에 가깝기 떼문에 레이블의 정확도가 매우 높음.
- 정확도: 94%까지 향상.
- 참고
- 전체 데이터셋으로 훈련된 로지스틱 회귀 모델 성능: 정확도 96.9%
준지도학습과 능동학습¶
- 분류기 모델이 가장 불확실하기 예측하는 샘플에 레이블 추가하기
- 가능하면 서로 다른 군집에서 선택.
- 새 모델 학습
- 위 과정을 성능향상이 약해질 때까지 반복.
비지도학습 모델 2: DBSCAN¶
- 연속적인 밀집 지역을 하나의 군집으로 설정.
사이킷런의 DBSCAN 모델¶
- 두 개의 하이퍼파라미터 사용
eps: $\varepsilon$-이웃 범위- 주어진 기준값 $\varepsilon$ 반경 내에 위치한 샘플
min_samples: $\varepsilon$ 반경 내에 위치하는 이웃의 수
핵심샘플과 군집¶
- 핵심샘플: $\varepsilon$ 반경 내에 자신을 포함해서
min-samples개의 이웃을 갖는 샘플
- 군집: 핵심샘플로 이루어진 이웃들로 구성된 그룹
이상치¶
- 핵심샘플이 아니면서 동시에 햄심샘플의 이웃도 아닌 샘플.
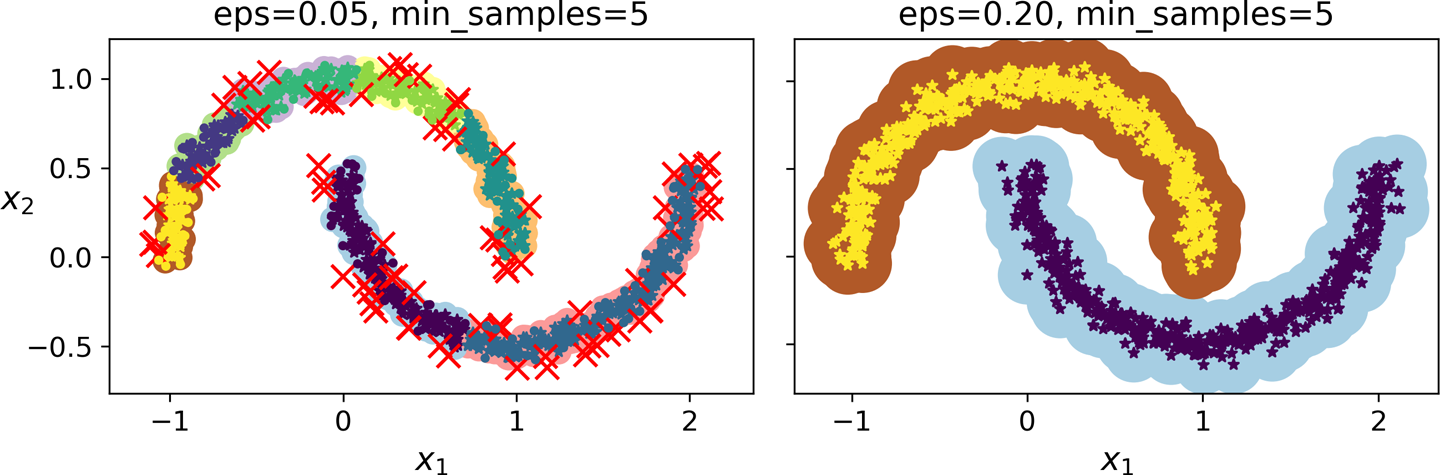
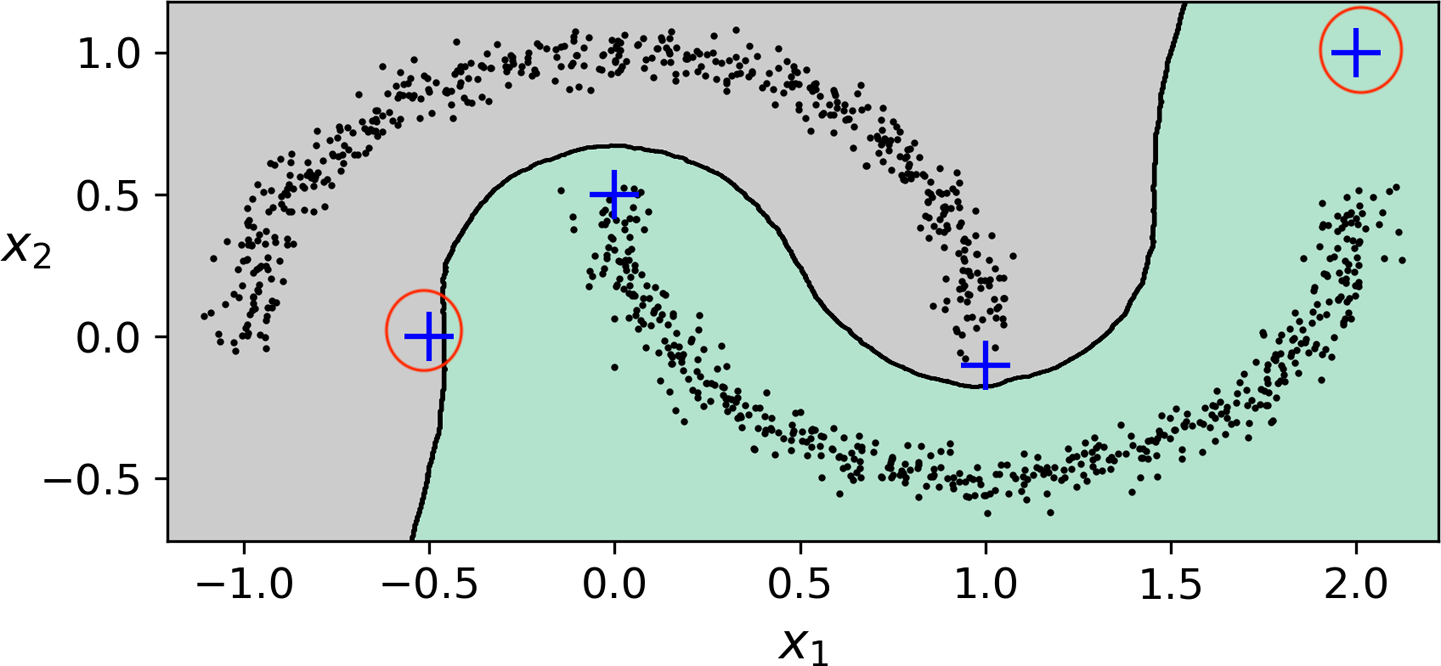
예제¶
- 반달모양 데이터 활용
from sklearn.cluster import DBSCAN
dbscan = DBSCAN(eps=0.05, min_samples=5)
dbscan.fit(X)
DBSCAN과 예측¶
predict()메서드 지원하지 않음.
- 이유:
KNeighborsClassifier등 보다 좋은 성능의 분류 알고리즘 활용 가능.
- 아래 코드: 핵심샘플 대상 훈련.
from sklearn.neighbors import KNeighborsClassifier
knn = KNeighborsClassifier(n_neighbors=50)
knn.fit(dbscan.components_, dbscan.labels_[dbscan.core_sample_indices_])
- 이후 새로운 샘플에 대한 예측 가능
- 아래 그림은 새로운 4개의 샘플에 대한 예측을 보여줌.
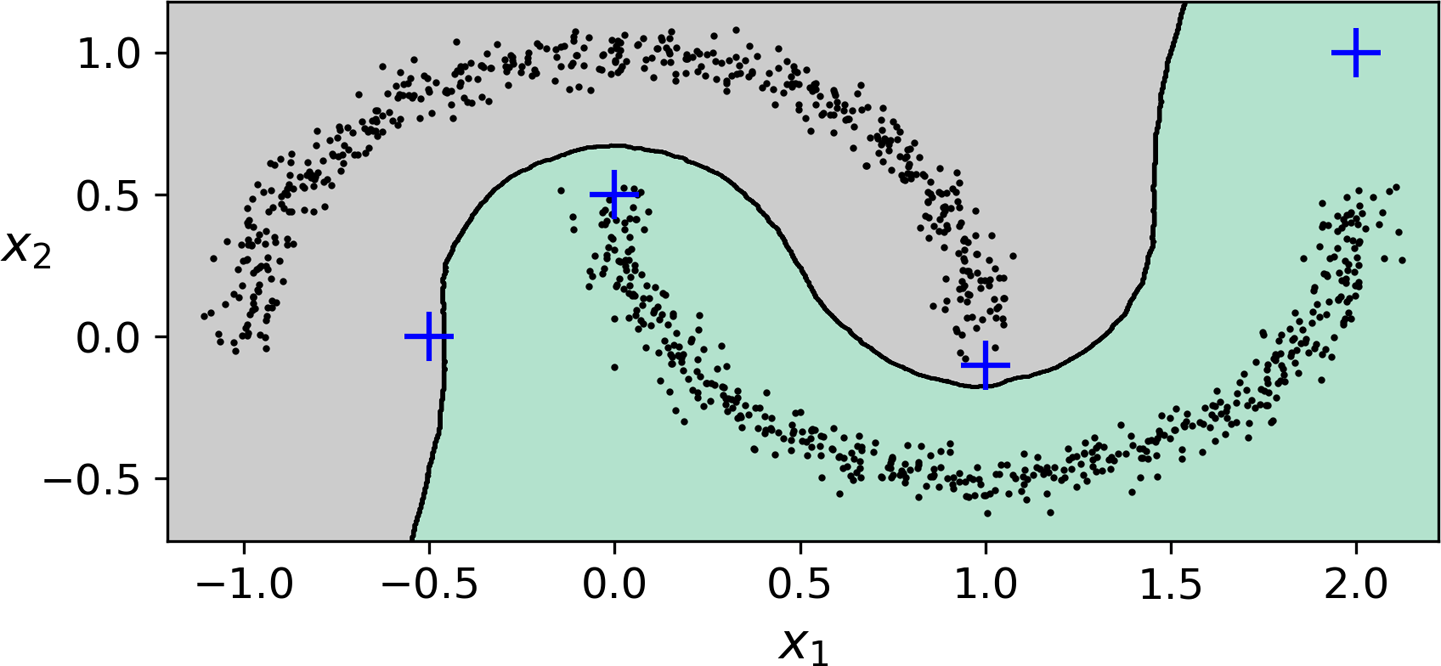
이상치 판단¶
- 위 예제에서, 두 군집으로부터 일정거리 이상 떨어진 샘플을 이상치로 간주 가능.
- 예를 들어, 양편 끝쪽에 위치한 두 개의 샘플이 이상치로 간주될 수 있음.
DBSCAN의 장단점¶
- 매우 간단하면서 매우 강력한 알고리즘.
- 하이퍼파라미터: 단 2개
- 군집의 모양과 개수에 상관없음.
- 이상치에 안정적임.
- 군깁 간의 밀집도가 크게 다르면 모든 군집 파악 불가능.
계산복잡도¶
- 시간복잡도: 약 $O(m\, \log m)$. 단, $m$은 샘플 수
- 공간복잡도: 사이킷런의 DBSCAN 모델은 $O(m^2)$의 메모리 요구.
eps가 커질 경우.
기타 군집 알고리즘¶
- 응집 군집(병합 군집, agglomerative clustering)
- BIRCH
- 평균-이동
- 유사도 전파
- 스펙트럼 군집
비지도학습 모델 3: 가우시안혼합 모델¶
- 데이터셋이 여러 개의 혼합된 가우시안 분포를 따르는 샘플들로 구성되었다고 가정.
- 가우시안 분포 = 정규분포
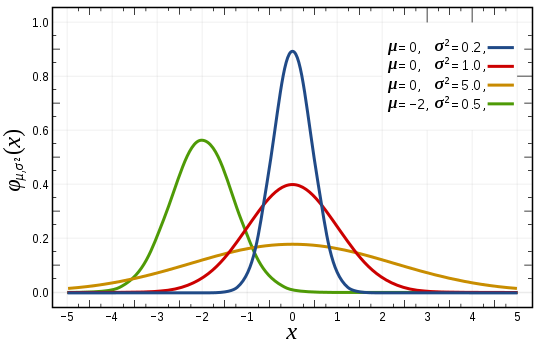
정규분포 소개¶
- 종 모양의 확률밀도함수를 갖는 확률분포
군집¶
- 하나의 가우시안 분포에서 생생된 모든 샘플들의 그룹
- 일반적으로 타원형 모양.
예제¶
- 아래 그림에서처럼 일반적으로 모양, 크기, 밀집도, 방향이 다름.
- 따라서 각 샘플이 어떤 정규분포를 따르는지를 파악하는 게 핵심.
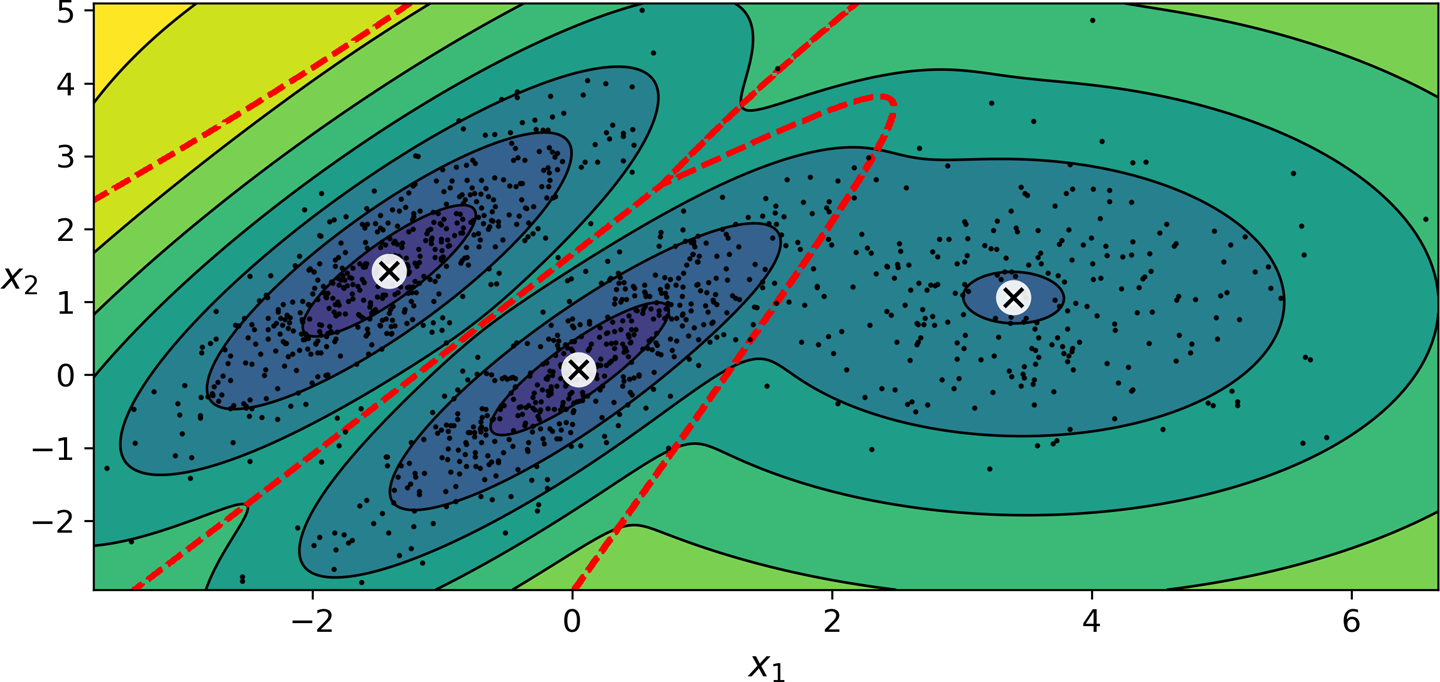
GMM 활용¶
- 위 데이터셋에
GaussianMixture모델 적용
n_components: 군집수 지정
n_init: 모델 학습 반복 횟수.- 파라미터(평균값, 공분산 등)를 무작위로 추정한 후 수렴할 때까지 학습시킴.
from sklearn.mixture import GaussianMixture
gm = GaussianMixture(n_components=3, n_init=10, random_state=42)
gm.fit(X)
- 아래 그림은 학습된 모델을 보여줌.
- 군집 평균, 결정 경계, 밀도 등고선
GMM 모델 규제¶
- 특성수가 크거나, 군집수가 많거나, 샘플이 적은 경우 최적 모델 학습 어려움.
- 공분산(covariance)에 규제를 가해서 학습을 도와줄 수 있음.
covariance_type설정.
covariance_type 옵션값¶
- full
- 아무런 제한 없음.
- 기본값임.
- spherical
- 군집이 원형이라 가정.
- 지름(분산)은 다를 수 있음.
- diag
- 어떤 타원형도 가능.
- 단. 타원의 축이 좌표축과 평행하다고 가정.
- tied
- 모든 군집의 동일 모양, 동일 크기, 동일 방향을 갖는다고 가정.

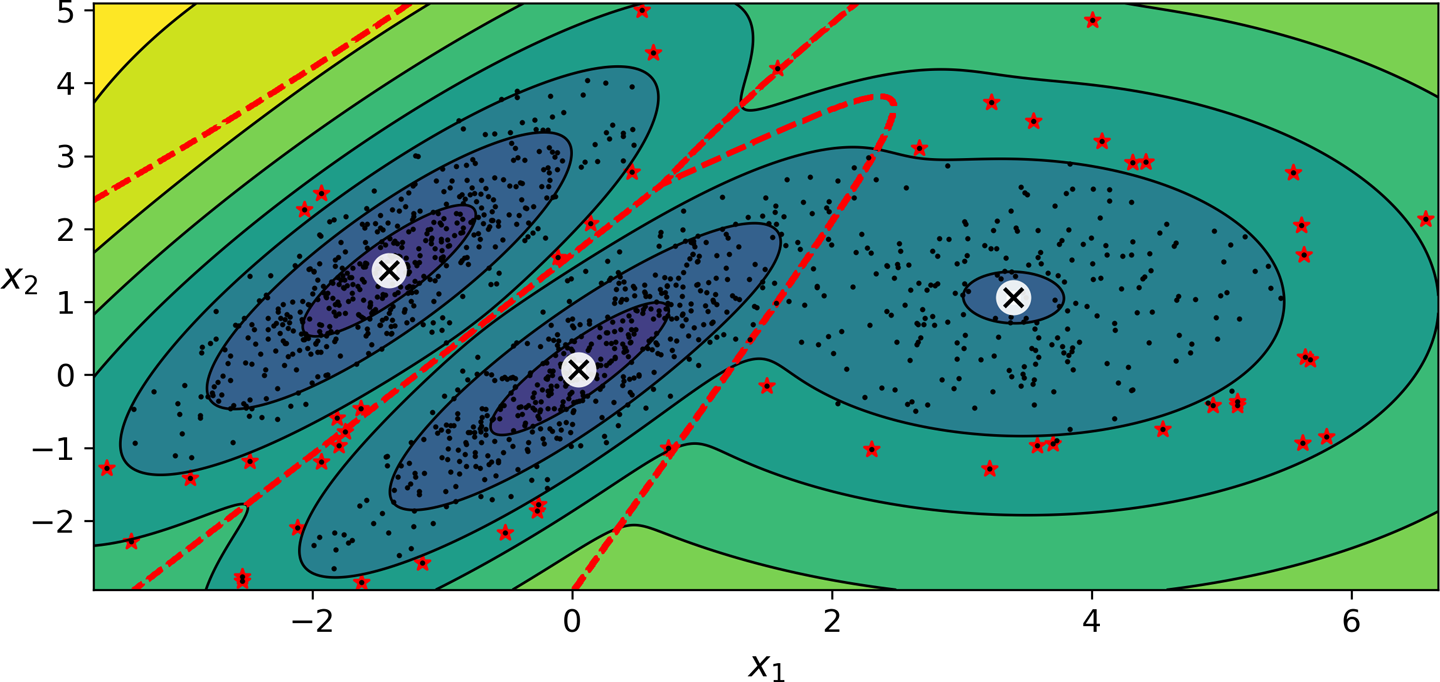
가우시안혼합 모델 활용: 이상치 탐지¶
- 밀도가 임곗값보다 낮은 지역에 있는 샘플을 이상치로 간주 가능.
가우션 혼합모델 군집수 지정¶
- K-평균에서 사용했던 관성 또는 실루엣 점수 사용 불가.
- 군집이 타원형일 때 값이 일정하지 않기 때문.
- 대신에 이론적 정보 기준 을 최소화 하는 모델 선택 가능.
이론적 정보 기준¶
BIC: Bayesian information criterion
$$ \log(m)\, p - 2 \log (\hat L)$$
AIC: Akaike information criterion
$$ 2\, p - 2 \log (\hat L)$$
- $m$: 샘플 수
- $p$: 모델이 학습해야 할 파라미터 수
- $\hat L$: 모델의 가능도 함수의 최댓값
- 학습해야 할 파라미터가 많을 수록 벌칙이 가해짐.
- 데이터에 잘 학습하는 모델일 수록 보상을 더해줌.
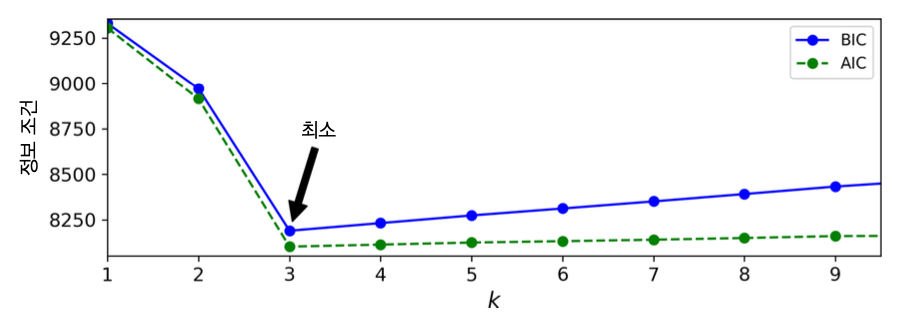
군집수와 정보조건¶
- 아래 그림은 군집수 $k$와 AIC, BIC의 관계를 보여줌.
- $k=3$이 최적으로 보임.
베이즈 가우시안혼합 모델¶
- 베이즈 확률통계론 활용
BayesianGaussianMixture 모델¶
- 최적의 군집수를 자동으로 찾아줌.
- 단, 최적의 군집수보다 큰 수를
n_components에 전달해야 함.- 즉, 군집에 대한 최소한의 정보를 알고 있다고 가정.
- 자동으로 불필요한 군집 제거
from sklearn.mixture import BayesianGaussianMixture
bgm = BayesianGaussianMixture(n_components=10, n_init=10, random_state=42)
bgm.fit(X)
- 결과는 군집수 3개를 사용한 이전 결과와 거의 동일.
- 군집수 확인 가능
>>> np.round(bgm.weights_, 2)
array([0.4 , 0.21, 0.4 , 0. , 0. , 0. , 0. , 0. , 0. , 0. ])
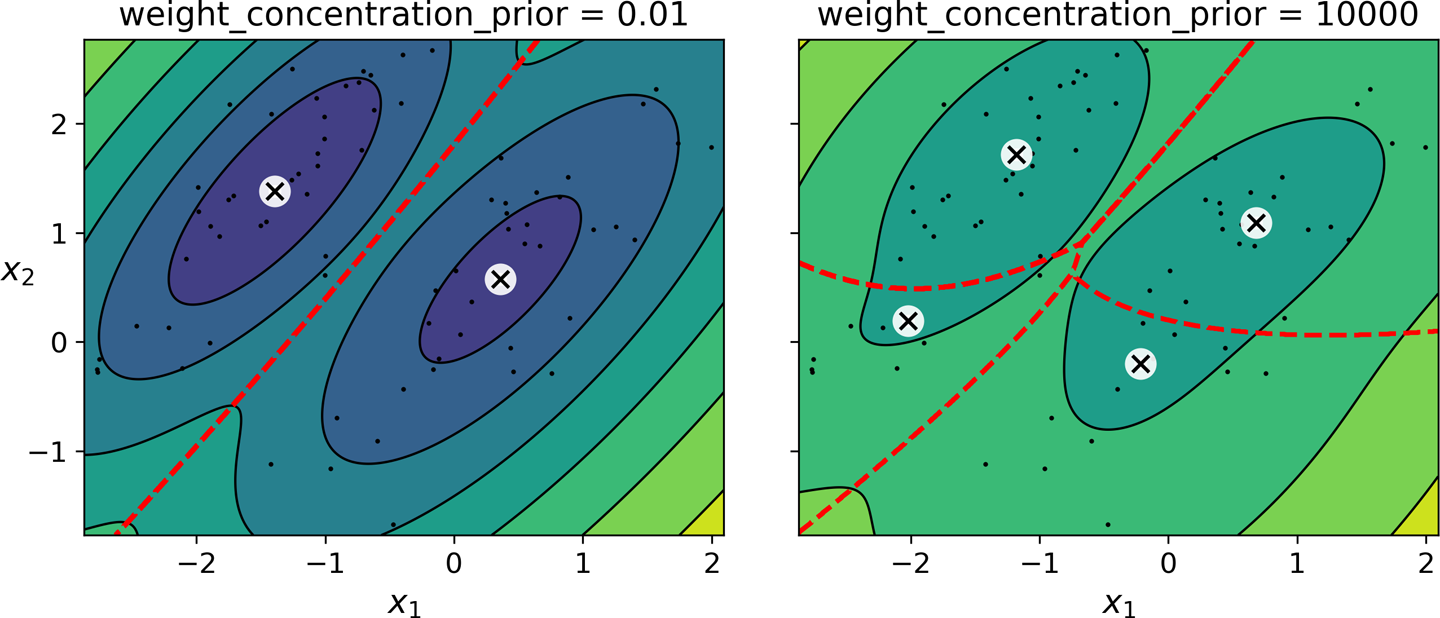
사전 믿음¶
- 군집수가 어느 정도일까를 나타내는 지수
weight_concentration_prior하이퍼파라미터n_components에 설정된 군집수에 대한 규제로 사용됨.- 작은 값이면 특정 군집의 가중치를 0에 가깝게 만들어 군집수를 줄이도록 함.
- 즉, 큰 값일 수록
n_components에 설정된 군집수가 유지되도록 함.
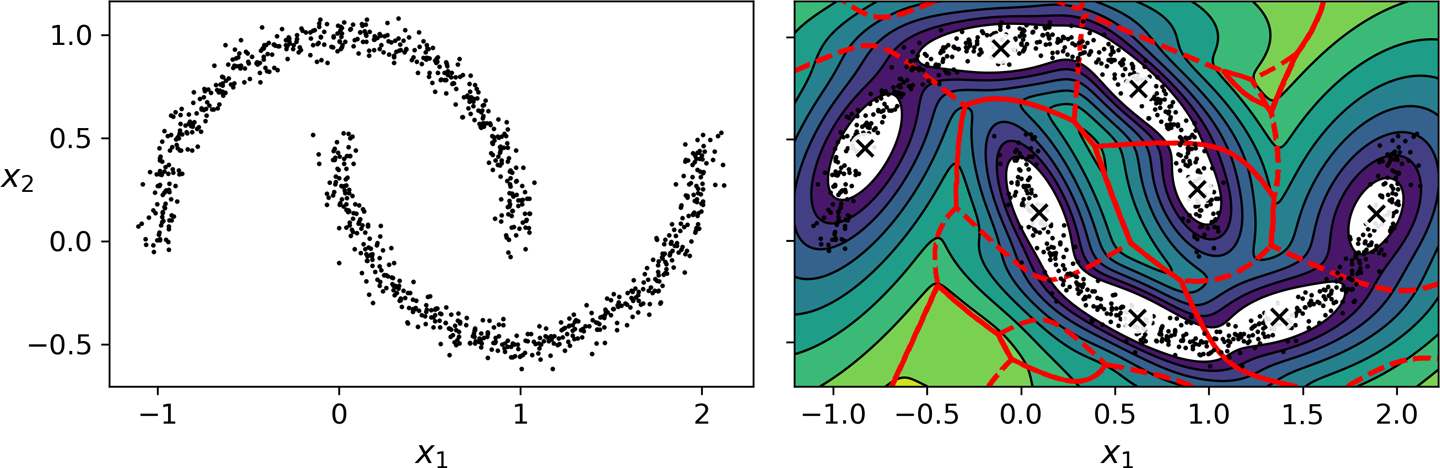
가우시안혼합 모델의 장단점¶
- 타원형 군집에 잘 작동.
- 하지만 다른 모양을 가진 데이터셋에서는 성능 좋지 않음.
- 예제: 달모양 데이터에 적용하는 경우
- 억지로 타원을 찾으려 시도함.
이상치 탐지와 특이치 탐지를 위한 다른 알고리즘¶
- PCA
- Fast-MCD
- 아이솔레이션 포레스트
- LOF
- one-class SVM
감사의 글: 슬라이드에 사용할 이미지를 제공한 한빛아카데미에 감사드립니다.