18장 강화학습 (1부)¶
감사의 글¶
자료를 공개한 저자 오렐리앙 제롱과 강의자료를 지원한 한빛아카데미에게 진심어린 감사를 전합니다.
소개¶
- 머신러닝 분야에서 가장 흥미로우며 가장 오래된 분야
- 게임, 기계 제어 등 매우 다양한 애플리케이션에서 활용됨
주요 내용¶
- 강화학습(Reinforcement Learning) 소개
- 심층 강화학습의 주요 기법 두 가지
- 정책 그레이디언트(policy gradients)
- 심층 Q-네트워크
- 마르코프 결정과정(Markov decision processes, MDPs)
- 실전 예제 1: 움직이는 카드(cart)에서 막대 균형잡기
- OpenAI-Gym 소개
- 정책 그레이디언트 활용
- 실전 예제 2: 브레이크아웃(Bradkout)이라는 아타리(Atari) 게임 플레이어 훈련시키기
- TF-Agents 라이브러리 소개
- 심층 Q-네트워크 활용
1절 보상 최적화 학습¶
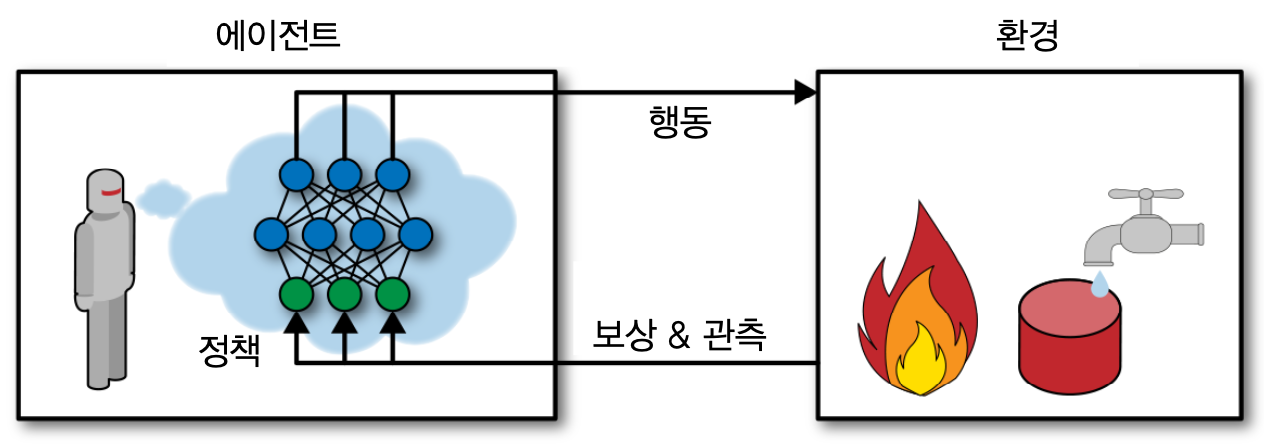
- 소프트웨어 에이전트(agent)가 주어진 환경에서 관측(observation) 후 행동(action)을 취하는 행위 반복
- 행위 결과에 따라 양(positive) 또는 음(negative)의 보상을 받음.
- 목표: 최대한의 (양의) 보상과 최소한의 (음의) 보상 받기
에이전트 학습 예제¶
주요 용어¶
에이전트
환경
관측
행동
보상
활용 사례¶
활용 사례 1: 로봇¶
- 에이전트: 로봇 제어 프로그램
- 환경: 실제 세상
- 관측: 카메라, 터치 센서 등을 이용하여 환경 관찰
- 행동: 모터를 구동하기 위해 시그널 전송
- 보상: 목적지에 도착할 때 양의 보상, 시간을 낭비하거나 잘못된 방향으로 향할 때 음의 보상 받음.
활용 사례 2: 미스 팩맨¶
- 에이전트: 미스 팩맨 제어 프로그램
- 환경: 아타리 게임 시뮬레이션
- 관측: 스크린샷
- 행동: 가능한 아홉 가지 조이스틱 위치
- 보상: 게임 점수
활용 사례 3: 바둑¶
- 미스 팩맨과 유사하게 작동
활용 사례 4: 온도조절기¶
- 에이전트: 온도제어 프로그램
- 환경: 주위 온도
- 관측: 온도
- 행동: 온도 조절
- 사람의 요구를 예측하도록 학습된 결과에 따라 행동 취함
- 보상: 에너지를 절약하면 양의 보상, 사람이 온도를 조작할 필요가 발생하면 음의 보상을 받음
활용 사례 5: 주식 자동매매 프로그램¶
- 에이전트: 자동매매 프로그램
- 환경: 주식시장
- 관측: 주식시장 가격
- 행동: 매초 얼마나 사고팔아야 할지 결정
- 보상: 금전적 이익과 손실
주요 활용 영역¶
- 자율주행 자동차
- 추천 시스템
- 웹페이지 상에 광고배치
- 이미지 분류시스템 포커싱(주의집중) 영역 선정
보상의 종류¶
- 양의 보상: 기쁨
- 음의 보상: 아픔
- 양 또는 음의 보상이 전혀 없을 수도 있음
- 미로 게임 에이전트는 타임스텝마다 음의 보상을 받기에 빠르게 탈출하도록 학습함.
2절 정책 탐색¶
정책¶
- 에이전트(agent)가 행동을 결정하기 위해 사용하는 알고리즘
- 입력값: 관측
- 출력: 행동
- 입력값이 필요없을 수도 있음
- 예제: 30분 동안 수집한 먼지 양을 보상으로 받는 로봇진공청소기
확률적 정책¶
- 무작위성이 포함된 정책
- 예제: 로봇진공청소기
- 매 초마다 지정된 확률 p 만큼 전진.
- 무작위적으로 (1-p) 의 확률로 왼쪽 또는 오른쪽으로 회전하기.
- 회전 각도는 -r 과 r 사이의 임의의 값.
정책 파라미터 탐색¶
- 정책 파라미터: 정책에 사용되는 변경가능한 파라미터
- 로봇진공청소기의 경우: p 와 r.
- 정책 탐색: 가장 성는이 좋은 정책 마라미터 탐색
- 정책 공간: 정책 파라미터가 취할 수 있는 값들의 집합
정책 탐색 기법: 유전 알고리즘¶
- 예제
- 1세대: 정책 100개 랜덤하게 생성하여 사용해본 후 상위 20% 정책만 남김
- 2세대: 남겨진 20개을 정책을 각각 4개씩 약간의 무작위성을 추가하여 복사.
- 위 과정을 좋은 정책을 찾을 때까지 여러 세대에 걸쳐 반복.
- 주요 활용 예제: NEAT(NeuroEvolution of Augmenting Topologies) 알고리즘
정책 탐색 기법: 정책 그레이디언트(PG)¶
- 경사하강법과 유사한 방법
- 정책을 따른 결과인 보상이 최댓값을 갖도록 정책 파라미터들을 조금씩 변경하는 기법
- 보상이 최댓값을 갖도록 하기에 경사상승법 이라고도 불림.
- 예제: 로봇 진공청소기
- p의 값을 조금 크게 한 경과 30분 동안 더 많은 먼지를 수집할 경우 p의 값을 좀 더 키움. 그렇지 않으면 p의 값을 조금 줄임.
- PG에 대해 이번 장에서 자세히 다룰 것임.
- PG를 TF(텐서플로우)로 구현하려면 에이전트가 활동할 환경을 먼저 세팅해야 함. 여기서는 Open AI Gym 사용.
3절 Open AI Gym¶
- 아타리 게임, 보드게임, 2D/3D 물리적 시물레이션 등을 위한 시뮬레이션 환경 제공
- 시뮬레이션 환경 내에서 에이전트에 대한 다양한 정책을 훈련하고 비교할 수 있음.
설치¶
- 설치 요령은 책과 코랩 노트북 참조
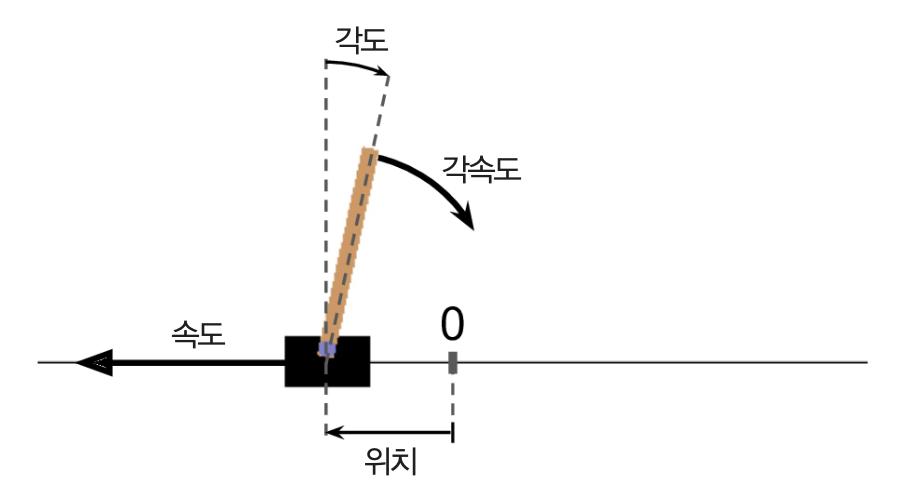
CartPole 환경¶
- 카드 위에 놓인 막대가 넘어지지 않도록 오른쪽/왼쪽으로 가속할 수 있는 2D 시뮬레이션 환경
CartPole 실행¶
환경 리셋하기¶
- CartPole-v1 환경을 생성한 후 리셋하여 환경 초기화 함.
import gym
env = gym.make("CartPole-v1")
obs = env.reset() # 초기화된 환경 관측치 할당
CartPole-v1의 경우
reset()메서드는 아래 모양의 초기화된 환경 관측값을 반환함.array([-0.01258566, -0.00156614, 0.04207708, -0.00180545])
- 0번 인덱스: 카트의 위치 (0.0은 중앙)
- 1번 인덱스: 카트의 이동 속도 (음수는 왼쪽 방향으로의 이동 의미)
- 2번 인덱스: 막대(pole)의 기울어진 각도(0.0은 수직)
- 3번 인덱스: 막대의 각속도(양수는 시계방향 의미)
gym이 제공하는 전체 시뮬레이션 리스트는 아래와 같이 확인:gym.envs.registry.all()
환경 렌더링¶
- 환경을 화면에 출력하려면
render()메서드 실행
render()메서드에서 반환된 이미지를 넘파이 배열로 받으려면mode="rgb_array"설정img = env.render(mode="rgb_array")
img에는 아래 모양의 컬러 사진이 저장됨.(800, 1200, 3) # img.shape
행동(actions)¶
가능한 행동은 다음과 같이 확인
env.action_space
CartPole-v1의 경우 다음과 0과 1 두 종류의 행동이 가능:
Discrete(2)
- 0: 왼쪽으로 가속하기
- 1: 오른쪽으로 가속하기
- 환경에 따라 다른 행동, 심지어 연속적인 값, 즉, 부동소수점으로 표현되는 행동도 가능.
예제: 초기 상태에서 막대가 오른쪽으로 쓰러지고 있기에 오른쪽으로 가속하는 행동 한 번 실행
action = 1 # 오른쪽으로 (살짝) 가속 obs, reward, done, info = env.step(action)
행동 결과는 아래와 같음:
# obs: 한 번 오른쪽으로 가속한 후 관측값 array([-0.01261699, 0.19292789, 0.04204097, -0.28092127]) # reward: CartPole의 경우 보상은 항상 1 1.0 # done: 게임 종료 여부, 즉, 막대가 쓰러졌는지 여부 False # info: 에이전트 관련 기타 정보. CartPole의 경우 없음. {}
정책 활용 예제: 하드 코딩¶
정책: 막대가 왼쪽으로 쓰러지면 왼쪽으로 가속, 오른쪽으로 쓰러지면 오른쪽으로 가속
def basic_policy(obs): angle = obs[2] return 0 if angle < 0 else 1
위 정책을 이용하여 에피소드 500번 시뮬레이션 실행.
- 매 에피소드마다 얻는 보상 저장
여기서 누적되는 보상은 게임이 종료될 때까지의 행동 실행횟수를 가리킴.
totals = [] for episode in range(500): episode_rewards = 0 obs = env.reset() for step in range(200): action = basic_policy(obs) obs, reward, done, info = env.step(action) episode_rewards += reward if done: break totals.append(episode_rewards)
평균적으로 41.7회, 최대 68회 행동 실행함.
# np.mean(totals), np.std(totals), np.min(totals), np.max(totals) (41.718, 8.858356280936096, 24.0, 68.0)
- 막대가 오래 서있지 못하고 좌우로 심하게 흔들리면서 쓰러짐.
- 신경망을 활용한 정책 알고리즘을 이용하면 더 좋은 정책을 생성함.
4절 신경망 정책¶
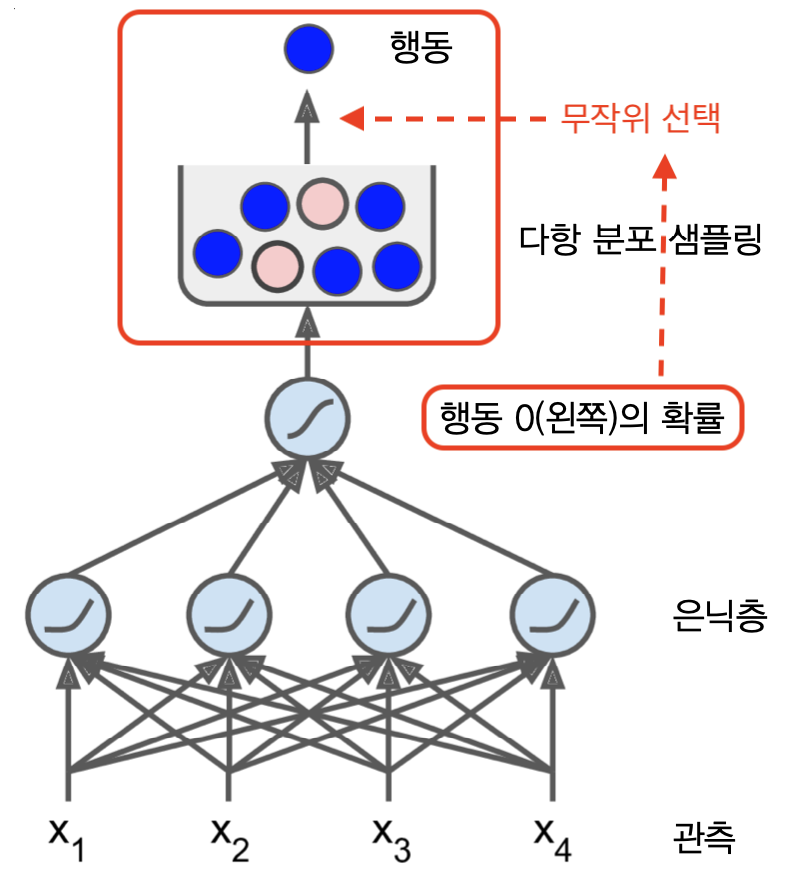
- 관측을 입력받아 실행할 행동을 결정하는 데에 사용되는 값을 반환하는 신경망 정책함수 구현
- 신경망 정책함수의 반환값: 실행할 행동에 대한 확률
확률적 행동¶
- 실제 행동은 행동에 대한 확률에 의거하여 무작위적으로 선택
- 이유: 새로운 활동에 대한 가능성을 열어 두었을 때 보다 나은 정책을 찾을 수도 있기 때문임.
행동 최종 결정¶
- 확률적으로 행동을 결정하는 것 이외에 과거의 행동과 관측을 행동을 결정하는 데에 활용할 수도 있음.
- CartPole 문제의 경우에는 해당되지 않음.
- 하지만 만약에 카트의 현재 위치만 관측된다면 현재 속도를 추정하기 위해 이전 관측도 활용해야 함.
예제¶
- tf.keras 를 활용한 신경망 정책 모델
- 출력층: 한 개의 뉴런과 시그모이드 활성화 함수 사용
- 좌우 움직임 이외의 다른 행동이 가능한 경우 그만큼의 뉴런 사용하며 최종적으로 소프트맥스 활성화 함수 활용
- 출력값: 0과 1사이의 확률값 반환. 여기서는 왼쪽으로 행동할 확률 지정
- 출력층: 한 개의 뉴런과 시그모이드 활성화 함수 사용
n_inputs = 4 # 관측값 모양(env.observation_space.shape[0])
model = keras.models.Sequential([
keras.layers.Dense(5, activation="elu", input_shape=[n_inputs]),
keras.layers.Dense(1, activation="sigmoid"),
])
5절 행동 평가¶
지도학습 신경망 모델의 일반적인 학습법¶
- 손실함수(
loss)를 기준으로 경사하강법(optimizer) 적용 - 평가지표
- 회귀모델: (일반적으로) 손실 기준
- 분류모델: 정확도(accuracy), ACU 등
- 회귀 모델
model.compile(loss="mse", optimizer="adam") model.fit()
- 분류 모델
model.compile(loss="sparse_categorical_crossentropy", optimizer="nadam", metrics=["accuracy"]) model.fit()
강화학습 신경망 모델 평가지표: 행동 이익¶
- 각 행동결정 단계에서의 가장 좋은 행동이 무엇인지 알고 있다면 일반적인 지도학습 활용 가능
loss를 예를 들어 추정된 확률과 타깃 확률 사이의 크로스 엔트로피로 정할 수 있음.
- 하지만 강화학습에서는 에이전트가 활용할 수 있는 것은 보상뿐임.
- 따라서 특정 행동의 영향력을 평가할 수 있는 기준이 요구됨.
- 행동 평가 = 행동에 따른 보상 평가하기
신용할당 문제¶
- 특정 행동이 보상에 미치는 영향을 평가하기가 매우 어려움을 나타냄.
- 행동의 결과가 늦게 보상을 줄 수 있음.
- 또한 어떤 행동이 보상에 얼마나 영향을 미쳤는가를 파악하기 어려움.
행동 대가(action return)¶
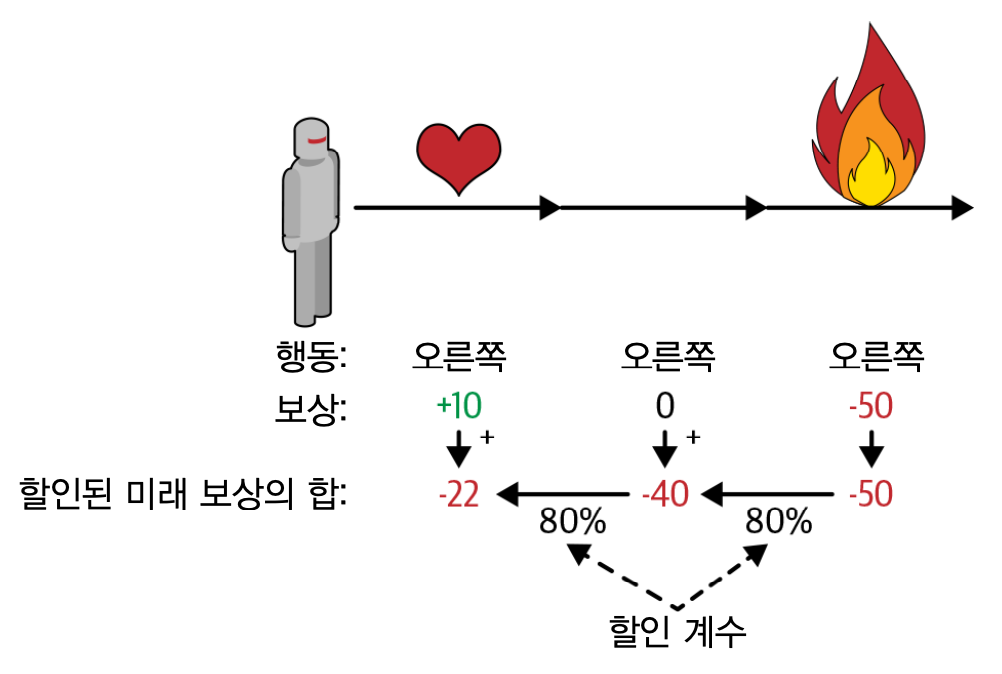
- 신용할당 문제의 해결 전략: 각 행동 결정단계마다 할인계수(discount factor) 감마($\gamma$) 를 적용한 보상을 모두 합하여 행동 평가
- 행동 대가(action return): 할인된 미래 보상의 누적 합
예제
- 아래 그림에서 에이전트가 오른쪽으로 세 번 움직이는 행동을 취함.
- 첫째 스텝에서 10, 둘째 스텝에서 0, 셋째 스텝에서 -50의 보상을 받음.
따라서 첫째 행동의 대가는 다음과 같이 계산됨:
$$ 10 + \gamma \cdot 0 + \gamma^2 \cdot (-50) = -22 $$
- 아래 그림에서 에이전트가 오른쪽으로 세 번 움직이는 행동을 취함.
할인계수¶
- 0과 1 사이의 값
- 1에 가까울 수록 보다 먼 미래의 보상이 보다 중요해짐.
- CartPole의 경우
- 행동의 효과가 매우 짧은 기간안에 나타남.
- 따라서 $\gamma = 0.95$ 가 적절해 보임. ($0.95^{13}\approx 0.5$)
행동이익(action advantage)¶
대가 정규화: 대가들의 평균과 표준편차를 계산한 후 표준점수로 변환하기
$$ Z = \frac{X - \mu(X)}{\sigma(X)} $$
- 행동 이익: 게임을 충분히 많이 실행한 후 계산한 각 행동에 대한 대가를 정규화한 값
- 많은 에피소드(시물레이션)를 실행하면서 얻은 각 행동에 대한 대가들의 평균값과 표준편차를 계산함.
행동 평가지표: 행동이익¶
- 양의 행동이익: 좋은 행동
- 음의 행동이익: 나쁜 행동
6절 정책 그레이디언트(Policy Gradients)¶
- PG: 높은 보상을 얻도록 신경망 정책 모델의 파라미터를 경사하강법으로 학습시키는 기법
REINFORCE 알고리즘¶
- 대표적인 PG 알고리즘
작동방식 요약¶
- 신경망 정책 모델을 활용한 게임을 여러 번의 에피소드로 실행하면서 아래 데이터 저장
- 시뮬레이션의 매 스텝마다 파라미터별로 그레이디언트 계산해서 저장.
- 시뮬레이션의 매 스텝마다 보상을 확인해서 저장
- 모든 에피소드 완료 후 매 스텝의 행동이익 계산
- 매 스텝에 대해 행동이익을 저장된 파라미터 그레이디언트와 곱하기
- 계산된 모든 그레이디언트의 평균값을 파라미터별로 계산
- 계산된 파라미터별 그레이디언트의 평균값을 신경망 정책 모델에 경사하강법을 이용하여 적용
구현: 스텝 실행 결과 반환 함수¶
- 스텝을 한 번 실행할 때마다 관측과 그레이디언트 반환하기 함수
- 타깃확률(
y_target): 0 또는 1- 정책 모델이 추천하는 방향을 타깃확률로 지정
- 따라서 손실(
loss)이 최소, 즉, 정책 모델이 가능한 좋은 확률로 행동을 추천하는 방향으로 유도함.
- 그레이디언트(
grads): 실행된 스텝에서 각 파라미터에 대한 손실함수의 그레이디언트
def play_one_step(env, obs, model, loss_fn):
with tf.GradientTape() as tape:
left_proba = model(obs[np.newaxis])
action = (tf.random.uniform([1, 1]) > left_proba)
y_target = tf.constant([[1.]]) - tf.cast(action, tf.float32)
loss = tf.reduce_mean(loss_fn(y_target, left_proba))
grads = tape.gradient(loss, model.trainable_variables)
obs, reward, done, info = env.step(int(action[0, 0].numpy()))
return obs, reward, done, grads
구현: 여러 에피소드 실행 결과 반환 함수¶
- 에피소드 실행중에 발생하는 매 스텝의 결과인 보상과 그레이디언트를 리스트로 저장
- 모든 에피소드에 대해 반복
def play_multiple_episodes(env, n_episodes, n_max_steps, model, loss_fn):
all_rewards = []
all_grads = []
for episode in range(n_episodes):
current_rewards = []
current_grads = []
obs = env.reset()
for step in range(n_max_steps):
obs, reward, done, grads = play_one_step(env, obs, model, loss_fn)
current_rewards.append(reward)
current_grads.append(grads)
if done:
break
all_rewards.append(current_rewards)
all_grads.append(current_grads)
return all_rewards, all_grads
구현: 행동이익 반환 함수¶
discount_rewards()함수- 하나의 에피소드 내에서 발생하는 스텝별 보상에 대한 행동대가(return) 계산
- 하나의 에피소드 내에서 발생하는 스텝별 보상에 대한 행동대가(return) 계산
discount_and_normalize_rewards()함수- 모든 에피소드에 대해 스텝별 행동이익 계산
def discount_rewards(rewards, discount_rate):
discounted = np.array(rewards)
for step in range(len(rewards) - 2, -1, -1):
discounted[step] += discounted[step + 1] * discount_rate
return discounted
def discount_and_normalize_rewards(all_rewards, discount_rate):
all_discounted_rewards = [discount_rewards(rewards, discount_rate)
for rewards in all_rewards]
flat_rewards = np.concatenate(all_discounted_rewards)
reward_mean = flat_rewards.mean()
reward_std = flat_rewards.std()
return [(discounted_rewards - reward_mean) / reward_std
for discounted_rewards in all_discounted_rewards]
구현: 신경망 정책 모델 훈련¶
discount_rewards()함수- 하나의 에피소드 내에서 발생하는 스텝별 보상에 대한 행동대가(return) 계산
- 하나의 에피소드 내에서 발생하는 스텝별 보상에 대한 행동대가(return) 계산
discount_and_normalize_rewards()함수- 모든 에피소드에 대해 스텝별 행동이익 계산
n_iterations = 150 # PG 적용을 150번 실행
n_episodes_per_update = 10 # 10번 에피소드마다 PG 적용
n_max_steps = 200 # 매 에피소드마다 최대 200번 행동
discount_rate = 0.95 # 할인계수
optimizer = keras.optimizers.Adam(lr=0.01)
loss_fn = keras.losses.binary_crossentropy # 손실함수
model = keras.models.Sequential([
keras.layers.Dense(5, activation="elu", input_shape=[4]),
keras.layers.Dense(1, activation="sigmoid"),
])
env = gym.make("CartPole-v1")
# PG 적용: 150회
for iteration in range(n_iterations):
# 에피소드 10번 실행
all_rewards, all_grads = play_multiple_episodes(
env, n_episodes_per_update, n_max_steps, model, loss_fn)
all_final_rewards = discount_and_normalize_rewards(all_rewards,
discount_rate)
all_mean_grads = []
# 스텝별 그레이디언트에 스텝별 행동이익을 곱한 후 파라미터별 그레이디언트 평균값 계산
for var_index in range(len(model.trainable_variables)):
mean_grads = tf.reduce_mean(
[final_reward * all_grads[episode_index][step][var_index]
for episode_index, final_rewards in enumerate(all_final_rewards)
for step, final_reward in enumerate(final_rewards)], axis=0)
all_mean_grads.append(mean_grads)
# 계산된 파라미터별 그레이디언트를 기존의 파라미터에 더하는 방식으로 경사하강법 적용
optimizer.apply_gradients(zip(all_mean_grads, model.trainable_variables))
결과¶
- 평균 보상이 200에 거의 가까울 정도로 학습이 잘됨(구글 코랩 노트북 참조).
- 하지만 학습을 위해 매우 많은 게임을 실행해야 함. 즉, 샘플 효율성이 매우 낮음.
- CartPole 용도의 정책 그레이디언트 알고리즘을 다른 문제에 활용하기에는 알고리즘이 너무 단순함.
- 하지만 나중에 짧게 소개할 Actor-Critic 알고리즘의 기초로 사용됨.